検索条件
RSC-U485がubuntuで認識されなかったため、FT232RLとLTC485CN8でまがいものを作った記録です。
2012/1/13追記
この記事のコメントで,以下のようにすることでUbuntuでもRSC-U485が認識することをまえださんから教えて頂きました.
ありがとうございます!
Ubuntu 9.10 では RS-U485 を
# modprobe ftdi_sio vendor=0x1115 product=0x0008
で認識しました.
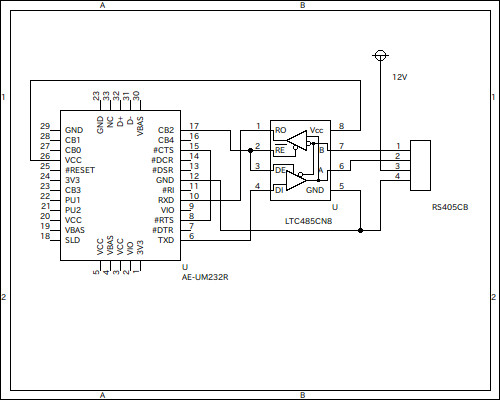
FT232RLはデフォルトだとCBUS2がTXDENとして機能しているそうなので、CBUS2をREとDEに接続することでRS485通信を行えます。

秋月のFT232RLモジュールの下にLTC485CN8が置いてあります。
ついでにハブとしての回路も持たせてみてます。ちょっとスイッチが小さいのが心配ですが。。
これで一応WindowsでもLinuxからでもRS405CBが制御できるようになりました。
知り合いの人から「マイコンからRS485通信がしたいぜうぎぎ」と要望があったのが発端となり、LTC485CN8とArduinoでRS405CBを動かしてみたレポートです.
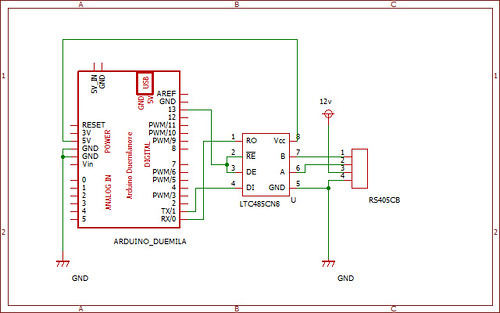
LTC485CN8はDE,RE端子の状態によって送信、受信のモードを切り替えて使います。
つまりマイコンは,DE,REに直結した端子をHIGHにしてから送信、LOWにしてから受信というように処理を行えばいいわけですね。
あとはまぁ別に普通のシリアル通信です。
余談となってしまうんですが,RS405CBの設定で返信ディレイ時間が用意されている理由は、送受信の切り替えに時間がかかるマイコンを使ったときに調整するためなのかなぁと思ってます。
RS405CBはFutabaのロボット用サーボの開発成果を全て盛り込んだという触れ込みだけあって、色々気が使われてる印象がありますね。
プログラムはちょっと長いので続きを読むに置いときました。